SAP
人工智能
scipy
CTF
二叉树
LAMBDA
开发板
DOM型XSS
完全背包
Fabric
Setup 函数的使用
go
codeblock
微信小程序登录
网页数据抓取
斐波那契数列
OPENCV_DIR
文献解读
SpringMVC框架异常处理
锁
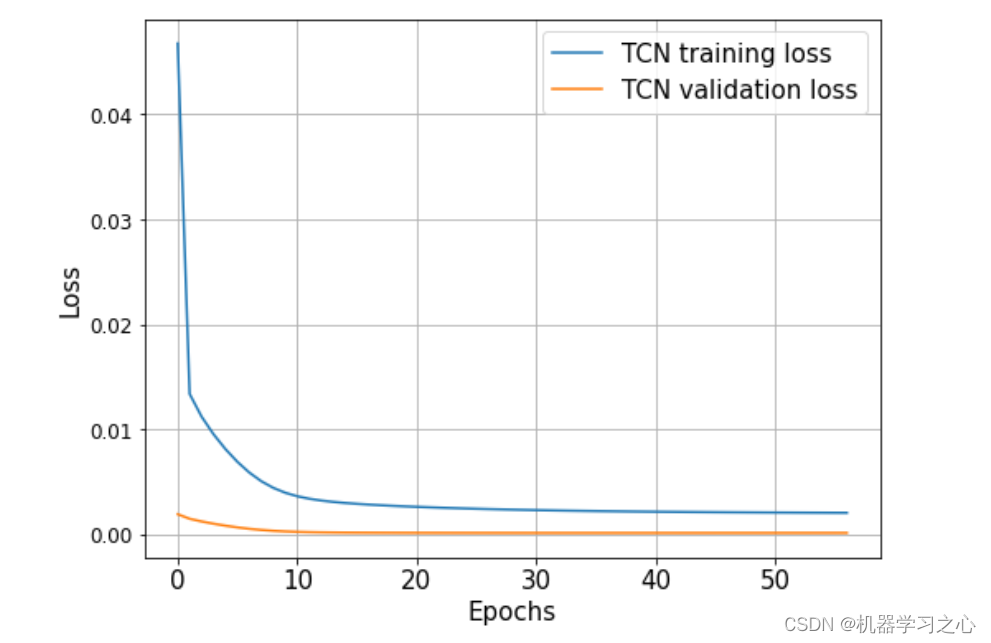
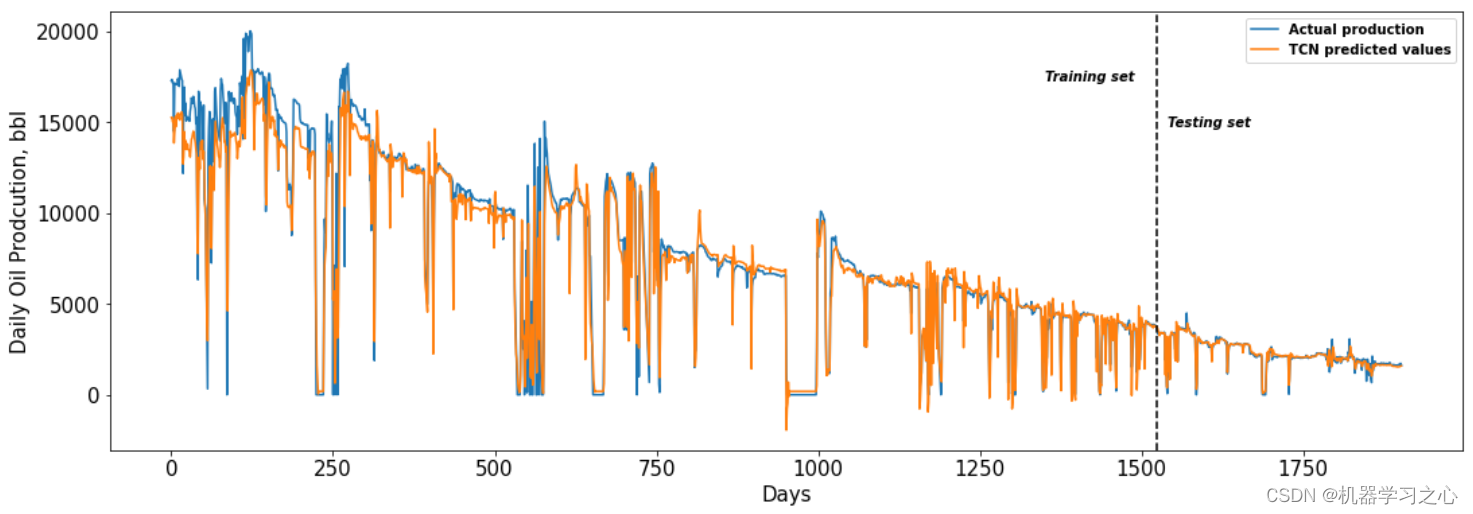
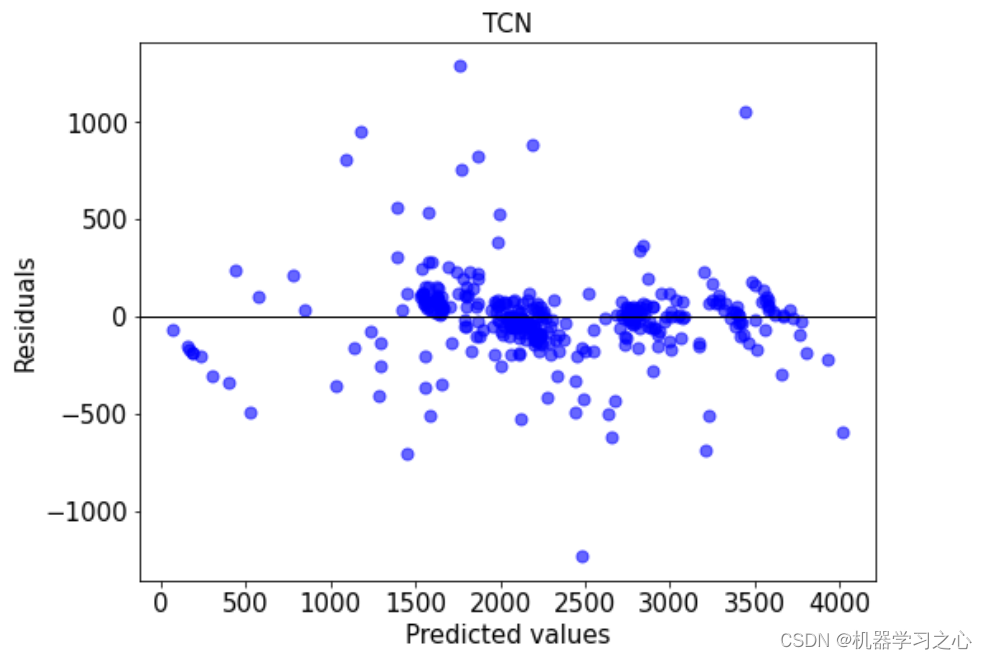
时序预测 | Python实现TCN时间卷积神经网络时间序列预测(多图,多指标)
相关文章
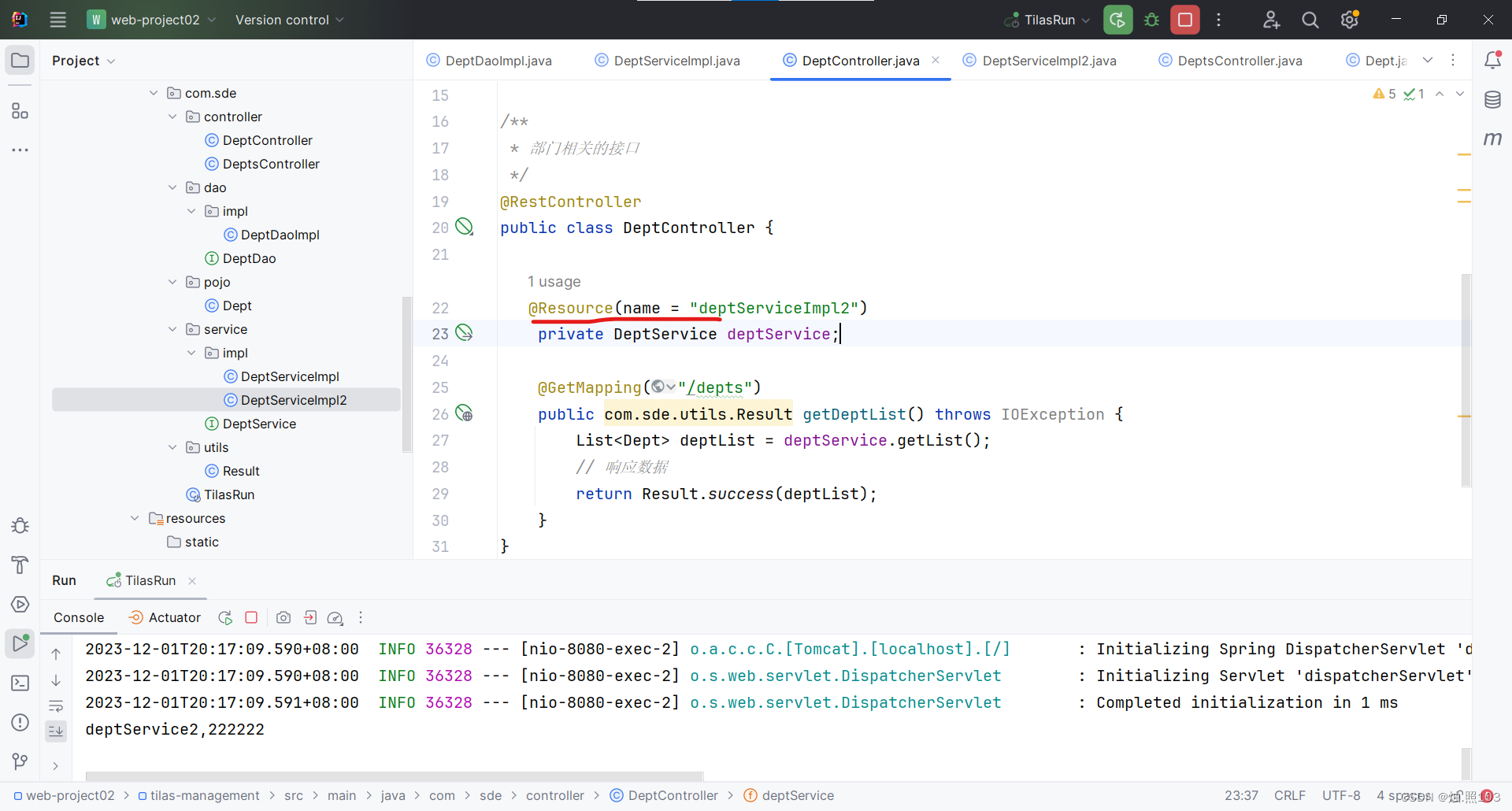
java开发实战 基于Resuful风格开发接口, IocDi和nginx,以及三层架构思想,分层解耦,并使用Apifox对接口数据进行测试。
开发规范: 前后端分离: 根据需求文档开发 Resultful风格: REST(REpresentational State Transfer),表述性状态转换,它是一种软件架构风格。 POST(insert) 负责新增的操作 http://localhost:8080…
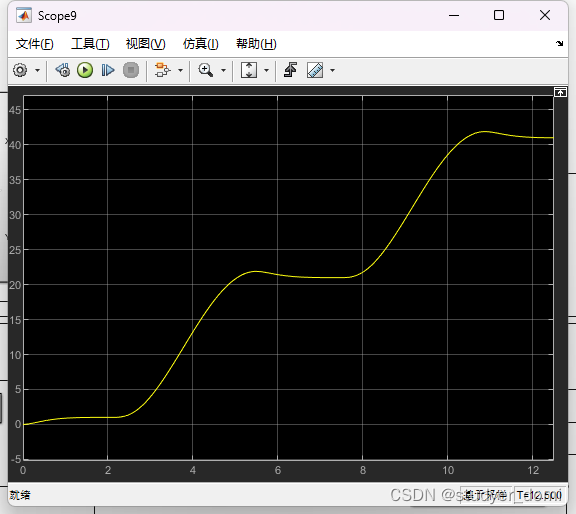
matlab基于线性二次调节器(LQR)法实现机器人路径规划可变轨迹跟踪
1、内容简介
略 可以交流、咨询、答疑
2、内容说明
基于线性二次调节器(LQR)法实现机器人路径规划可变轨迹跟踪
3、仿真分析
略 load path.mat
%% 轨迹处理
% 定义参考轨迹
refPos_x path(:,1);
refPos_y path(:,2);
refPos [refPos_x, refPos_y];% 计算航向角和曲率
…
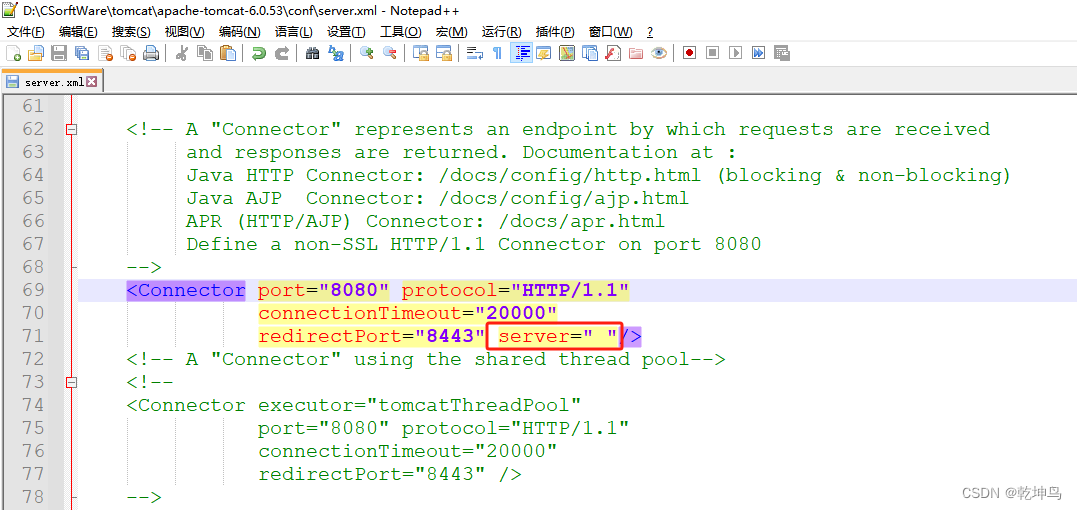
Tomcat 漏洞修复
1、去掉请求响应中Server信息 修复方法:
在Tomcat的配置文件的Connector中增加 server" " ,server 的值可以改成你任意想返回的值。
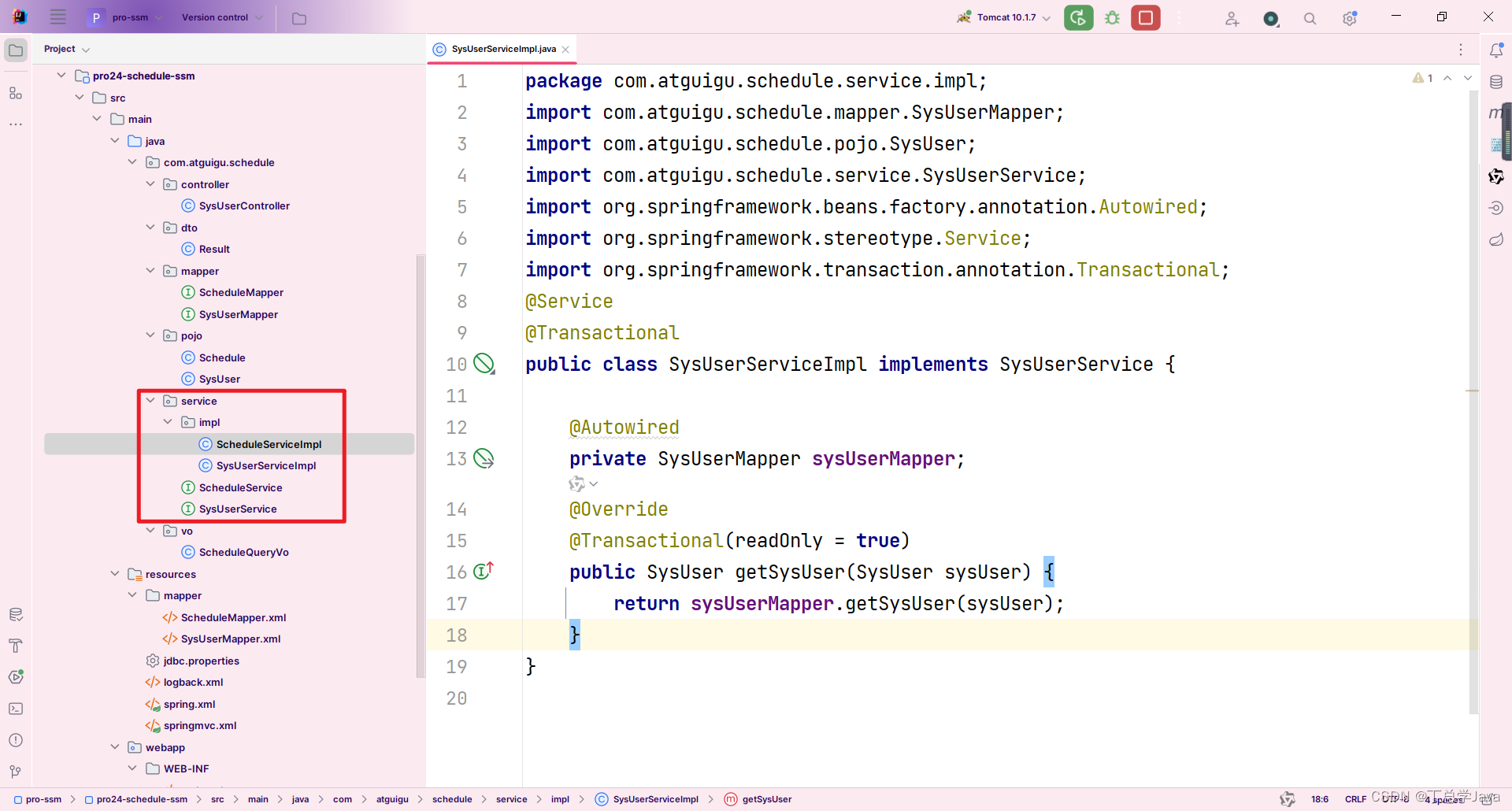
SSM项目实战-service实现
1、SysUserService.java package com.atguigu.schedule.service;import com.atguigu.schedule.pojo.SysUser;public interface SysUserService {SysUser getSysUser(SysUser sysUser);
}2、SysUserServiceImpl.java package com.atguigu.schedule.service.impl;
import com.atg…

点云从入门到精通技术详解100篇-基于三维点云的工件曲面轮廓检测与机器人打磨轨迹规划(中)
目录 2.2.2 散乱点云滤波去噪 2.2.3 海量点云数据压缩 2.3 点云采集与预处理实验
Vue渲染内容的三种方式
{{ }} 语法:将数据作为普通文本输出,不会覆盖原有的内容。
v-text 指令:将数据作为普通文本输出,会覆盖原有的内容。
v-html 指令:将数据作为 HTML 标签解析后输出,会覆盖原有的内容。
注:一…
剑指 Offer(第2版)面试题 13:机器人的运动范围
剑指 Offer(第2版)面试题 13:机器人的运动范围 剑指 Offer(第2版)面试题 13:机器人的运动范围解法1:深度优先搜索 剑指 Offer(第2版)面试题 13:机器人的运动范…

基于Linux安装配置消息队列RabbitMQ
基于Linux安装配置消息队列RabbitMQ的详细过程! ##jdk start
export JAVA_HOME/usr/local/jdk1.8.0_231 export CLASSPATH.:${JAVA_HOME}/jre/lib/rt.jar:${JAVA_HOME}/lib/dt.jar:${JAVA_HOME}/lib/tools.jar export PATH$PATH:${JAVA_HOME}/bin
##jdk end ## ma…